当前,人形机器人产业的焦点正从简单的移动能力转向复杂的操作能力,而灵巧手正是实现这一跨越的核心技术。它被认为是机器人产业链中技术壁垒最高、价值量最大的组成部分,占据整机成本的15%至20%。在有限空间内集成超过20个自由度的关节、微型驱动系统、多模态传感器和实时控制算法,同时实现轻量化、高负载、低成本及规模化量产,是其制造上的巨大挑战。
因此,灵巧手被业界视为人形机器人实现商业化应用的关键环节,引发了产业链各方的激烈竞争。
近日,被誉为“杭州新八骏”之一的曦诺未来公司宣布完成数亿元A轮融资,累计融资金额已接近10亿元。本轮融资由理想战投、中信建投资本、中信建投投资联合领投,长三角数文集团、源珈基金跟投,老股东财通资本、小米战投、电科基金持续加码。本轮资金将主要用于提升通用灵巧执行平台的可靠性,强化规模化量产与交付能力,并推动“硬件+算法+数据”的全栈闭环。
根据规划,公司计划到2026年底前,灵巧手年产能将达到1万台,微型电缸年产能达到20万台。
曦诺未来成立于2024年底,与仅提供硬件的厂商不同,该公司致力于成为通用灵巧操作的全栈解决方案提供商。其技术架构以灵巧手为核心硬件,以臂手一体化协同为执行框架,并以小脑运控算法为智能中枢,构建了从“感知-控制-反馈”的完整闭环控制体系,为各类机器人本体厂商、算法公司、科研机构及终端用户提供灵巧操作的软硬件基础。
公司创始人兼首席执行官夏宇轩是一位95后,拥有国际顶尖学府的物理与计算机科学双学位背景。他曾任职于摩根士丹利、鼎晖投资等机构,长期关注硬科技与高端制造领域,包括自动驾驶、激光雷达、芯片及光模块等前沿技术。
在短短一年内,曦诺未来团队规模从最初的几人迅速扩张至300多人。其核心成员在高效能电机系统、电机控制、机电一体化和精密驱动领域积累了二十余年的经验,这些研发和工程人才主要来自大疆、舍弗勒、KUKA、Apple、FESTO、宁德时代、联合汽车电子以及头部医疗机器人公司等行业领军企业。团队成员还涵盖了清华大学、上海交通大学、浙江大学、武汉大学以及宾夕法尼亚大学、哥伦比亚大学、慕尼黑工业大学等国内外知名高校的毕业生,具备将电机电控、机械传动、结构和算法能力系统性应用于具身智能领域的工程经验。
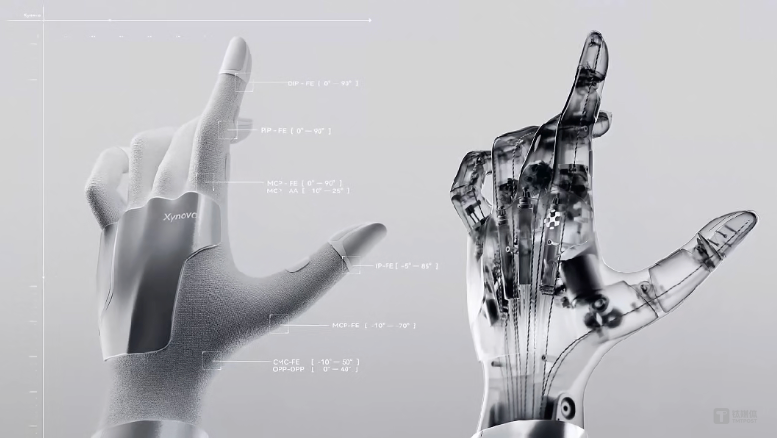
目前,灵巧手的设计主要围绕电机直驱、腱绳驱动和连杆驱动三大技术流派展开,同时也有厂商探索混合驱动方案。曦诺未来选择以腱绳驱动为核心的混合驱动方案。
去年8月,公司推出了全球首款全自主研发的量产高自由度腱绳驱动灵巧手Xynova Flex 1。该产品拥有25个自由度,手掌重量仅380克,负载能力超过30公斤,单指指尖力超过20N。曦诺未来宣称,这是目前市场上自重最轻、负载力最高的高自由度灵巧手。
今年5月中旬,曦诺未来进一步发布了全球首款采用“腱绳+电机直驱”混合驱动的仿生灵巧手Flex 2。该产品在继承Flex 1臂手一体优势的基础上,手掌重量不足400克,拥有23个自由度,指尖力达到20N以上,单手峰值抓取负载可达12公斤,持续作业额定负载为4公斤。Flex 2还集成了视觉、触觉、力觉和接近觉四类传感器,配合类人“小脑算法”,能够实现自适应抓取和带载反驱等更复杂、更智能的手部操作。
按照规划,曦诺未来计划在2026年进一步拓展产品线,推出第二代Flex系列灵巧手,全面升级其感知能力、微型执行机构和传动能力。
当前,灵巧手的规模化量产仍是全球性难题。主要瓶颈包括微型空心杯电机及减速器供应链的成熟度、腱绳材料的长期耐久性、多自由度协同控制算法的稳定性,以及多模态传感器的成本控制。即使是特斯拉的Optimus机器人,其灵巧手的量产进度也明显落后于机器人本体。目前国内多数灵巧手厂商仍处于“小批量定制化”阶段,年交付量多在百台级别。
曦诺未来能否在年底前实现万台级产能的突破,将是验证其“全栈方案商”实力的关键考验。在硬科技领域,融资仅是开始,量产能力和客户口碑才是决定最终成败的因素。