(本文作者为 Chelsea_Sun,钛媒体经授权发布)
NextFin News -- 人形机器人行业正在经历一场关键性转变——从“能走路”到“能工作”。在这场转变中,所有人的目光都集中在一件事上:灵巧手。
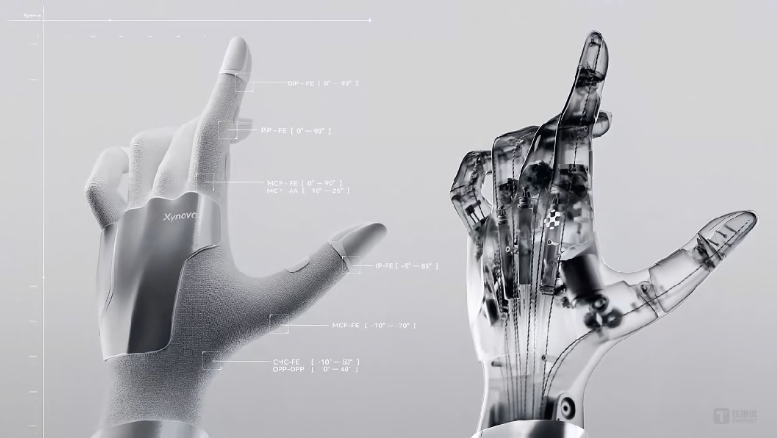
灵巧手被广泛认为是人形机器人供应链中技术壁垒最高、价值最集中的部件,占整机成本的15%到20%。其挑战在于,在比成人手掌更小的空间里,集成20多个自由度的关节、微型驱动系统、多模态传感器和实时控制算法,同时还要在轻量化、高负载、低成本和可规模化量产之间取得平衡。在全球范围内,只有少数参与者能够同时满足所有这些要求。
因此,在行业内,灵巧手被视为人形机器人商业化的“最后一公里”,也成为当前供应链竞争最激烈的环节。
近日,作为国内全栈通用灵巧操作解决方案提供商之一,同时也是“杭州新八强”的灵动科技,宣布完成数亿元A轮融资。本轮融资由理想汽车战略投资部、中金资本和中证投资联合领投,长三角数字文化集团和元嘉基金跟投,老股东财通资本、小米战略投资部和中电基金继续追加投资。光源资本担任独家财务顾问。截至目前,公司累计融资金额已近10亿元人民币。
据了解,本轮融资所得将主要用于构建高可靠通用灵巧驱动平台,强化规模化量产与交付能力,以及推进“硬件+算法+数据”的全栈闭环。根据计划,到2026年底,公司将正式实现年产10000台灵巧手和200000个微型电动缸的产能。
灵动科技成立于2024年末。与行业内单一产品硬件供应商不同,该公司将自身定位为通用灵巧操作的全栈解决方案提供商。在架构上,灵动科技以灵巧手为核心硬件基础,以臂手协同集成作为执行框架,并以“小脑”式运动控制算法作为智能中枢,旨在构建从“感知-控制-反馈”的完整闭环控制系统,为人形机器人整机厂、算法公司、科研客户以及终端场景客户提供灵巧操作的软硬件基础。
创始人兼CEO夏雨暄出生于1995年后,毕业于国际顶尖大学,拥有物理和计算机科学双学位。他曾任职于摩根士丹利、鼎晖投资等机构,长期关注硬科技和高端制造领域——涵盖自动驾驶、激光雷达到芯片和光学模组。
在短短一年内,团队已从创业初期的五六人壮大到300多人。核心成员在高性能电机系统、电机控制、机电一体化和精密驱动技术方面拥有超过二十年的技术专长。据了解,这些研发和工程人才大多来自大疆、舍弗勒、库卡、苹果、FESTO、宁德时代、联合汽车电子等一线工业企业以及领先的医疗机器人公司。团队还汇集了清华大学、上海交通大学、浙江大学、武汉大学以及宾夕法尼亚大学、哥伦比亚大学、慕尼黑工业大学等国内外高校的深厚技术人才。他们拥有将电机和电机控制、机械传动、结构和算法能力系统地迁移到具身智能领域的工程经验。
目前,灵巧手设计主要围绕三种主要技术路径展开:直驱电机、肌腱驱动(绳驱)和连杆驱动,同时也有一些制造商正在探索混合驱动解决方案。
灵动未来选择了一种以绳索驱动为中心的混合驱动解决方案。去年8月,该公司推出了全球首款完全自主研发、可量产的高自由度绳索驱动灵巧手Xynova Flex 1。Xynova Flex 1拥有25个自由度,手掌重量仅380克,负载能力超过30公斤,指尖力超过20N。灵动未来表示,这是目前市场上最轻、负载最高的高自由度灵巧手。
5月中旬,在Flex 1的臂手集成优势基础上,灵动未来发布了全球首款采用“绳索+直驱电机”混合驱动的仿生灵巧手Flex 2。其手掌重量不足400克,拥有23个自由度(19个主动自由度和4个被动自由度),指尖力超过20N,单手峰值抓取负载可达12公斤,连续工作额定负载为4公斤。同时,Flex 2集成了视觉、触觉、力觉和近场四种传感器,并搭配人形“小脑式算法”,可执行更复杂、更智能的手部操作,如自适应抓取和负载下的回驱动性。
根据其路线图,灵动未来将在2026年进一步扩大产品组合,计划推出其产品。