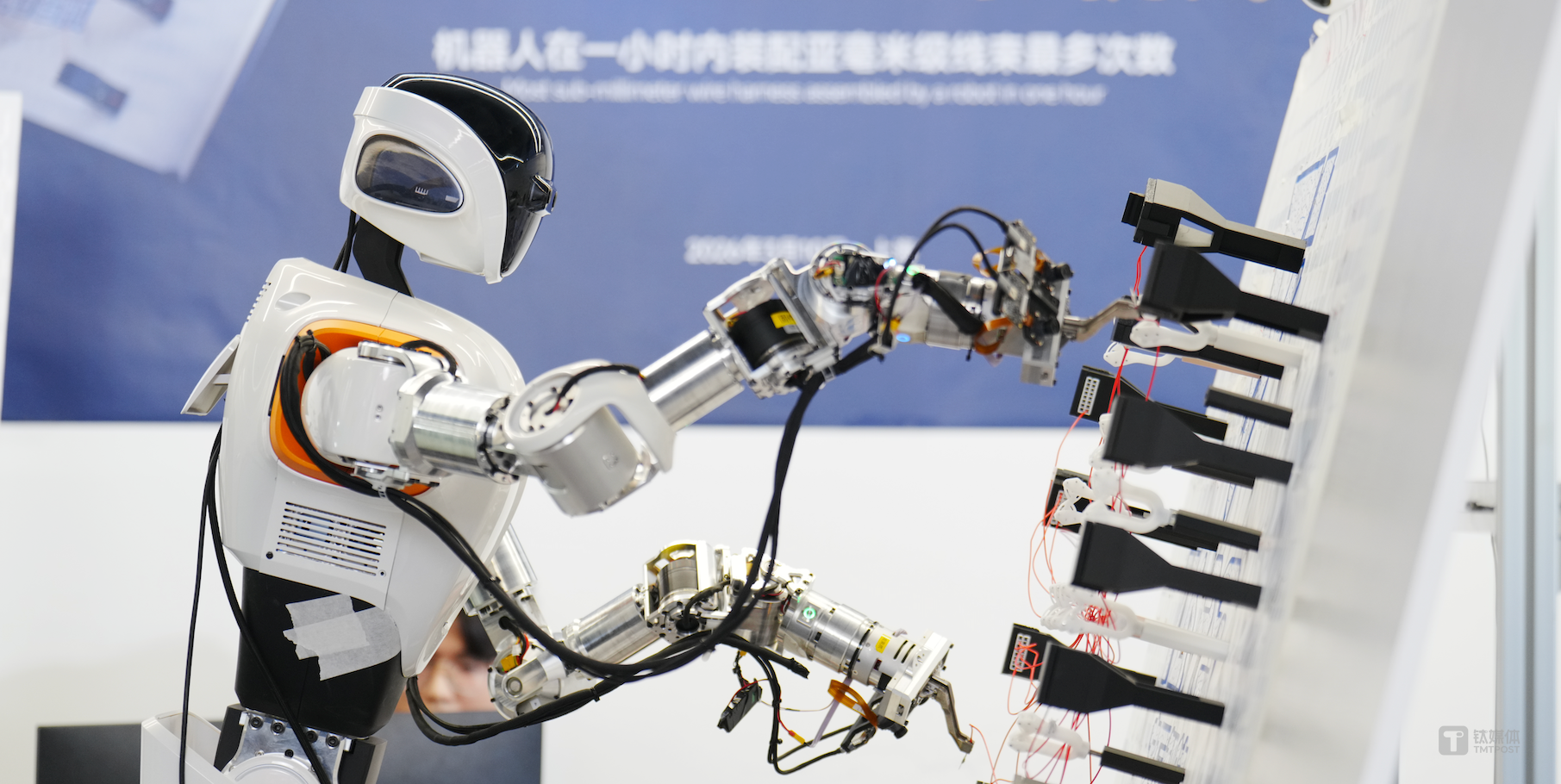
在工业自动化领域,线束装配过去一直是个难以实现自动化的环节。汽车线束作为车辆内部的“血管”,其复杂的柔性结构、众多的分支和亚毫米级的插接精度,使得这项工作长期以来高度依赖人工。然而,随着劳动力成本上升和人员流失加剧,企业对自动化解决方案的需求日益迫切。
它石智航A1机器人的出现,为这一难题提供了突破口。该机器人创下了吉尼斯世界纪录,能够在短短一小时内完成超过百次的亚毫米级柔性线束装配。公司联合创始人兼首席架构师陈同庆强调,他们始终坚持“不做伪需求,不为资本市场拼凑场景”以及“选择市场空间大、需求旺盛且技术壁垒高的路线”这两条底线,而线束装配恰好满足了这些考量。
资本市场对它石智航的反馈异常积极。公司成立于2025年2月,在短短数月内便完成了两次大规模融资。2025年3月和7月,其天使轮融资总额超过2.4亿美元,刷新了中国具身智能领域天使轮融资规模的纪录。紧接着,2026年4月,又获得了4.55亿美元的Pre-A轮融资,再次创造了具身智能单轮融资的历史新高。
此次融资的投资方阵容强大,包括高瓴创投、红杉中国等知名财务投资机构,以及美团战投等基石战略股东。启明创投、线性资本等原有投资者也追加了战略投资。此外,TCL创投、孚腾资本、首程控股等产业资本,以及北京机器人产业发展投资基金、上海国投先导等国有资本也参与其中,显示了市场对它石智航未来发展的高度认可。
陈同庆表示,2026年是它石智航的量产关键之年。他认为,具身智能行业未来的发展趋势与自动驾驶领域有相似之处,即市场将最终走向集中,只有具备解决实际问题能力的“全栈团队”才能存活下来。这意味着公司不仅要拥有强大的软件算法,还必须能自主研发硬件,从而实现软硬件与算法的深度融合。
对于“能干活”的机器人,陈同庆给出了三个衡量维度:首先,产品必须解决客户生产线上的真实刚需,而非演示性需求;其次,机器人在恶劣复杂的工业环境中要能持续稳定运行,并具备可控的成本;最后,要满足体系化的工业级指标,如平均无故障工作时间(MTBF)、作业效率和续航能力等。他认为,只有实现了“体系化的工业级交付”,才能真正体现机器人的价值。
在技术层面,它石智航以具身大模型为核心,向下研发本体硬件,向上对接具体应用场景。他们发布了通用具身大模型AWE3.0和OmniVTA视触觉世界模型。AWE 3.0赋能机器人实现精细操作和跨场景泛化能力,而OmniVTA则通过“世界模型”让机器人胜任精密装配等复杂接触型任务。
在硬件方面,公司自主研发了SenseHub数据采集设备、高性能关节以及多种类型的灵巧末端执行器。同时,它石智航还推出了多系列机器人,包括A系列轮式机器人和T系列双足通用机器人。其中,A1机器人曾在德国LogiMAT展会上实现了连续不间断运行,展现了卓越的工业稳定性和可靠性。这表明公司不仅交付硬件,更提供了一套能解决高价值场景核心痛点的全栈生产力工具。
陈同庆指出,具身智能公司在初期最“烧钱”的环节是构建全栈闭环系统,这包括数据体系、大模型训练、应用场景落地以及可量产的软硬件基础系统和规模化制造。他强调,尽管不同阶段的投入重点会有调整,但对优秀人才的持续投入和组织能力的构建始终是公司最核心的长期投资。
目前,它石智航的SenseHub数据采集设备已实现商业交付,并在大量一线场景中投入使用。该设备采用“以人为中心”的采集理念,旨在通过自然融入人的作业流程,高效、低成本地获取海量数据,以支撑具身基座大模型的训练。公司还提出了“具身数据星火计划”,鼓励合作伙伴在合规前提下共享标准化数据,共同构建数据生态系统,目前已积累超过百万小时的优质数据。
团队规模方面,公司预计2026年将突破500人,正积极招募人才以支持其量产元年和行业发展。在海外市场拓展方面,它石智航计划通过海外工厂和合作伙伴渠道逐步进入,并在前期建立样板和交付能力。公司在德国LogiMAT展上的良好反馈也印证了其产品在国际市场的潜力,目前已收到国内外大量订单,呈现“爆单”状态,并将继续筛选最契合机器人应用的场景进行深耕。